Robot tat-tindif tal-anodi moħmi





Robot tat-tindif tal-anodi moħmi
Ir-robot tat-tindif tal-anodi moħmi huwa robot tal-illustrar intelliġenti artifiċjali li huwa żviluppat mill-kumpanija tagħna li jimmira għal ambjent tax-xogħol ħarxa waqt it-tindif u l-illustrar tal-anodi moħmija għall-funderiji tal-aluminju.
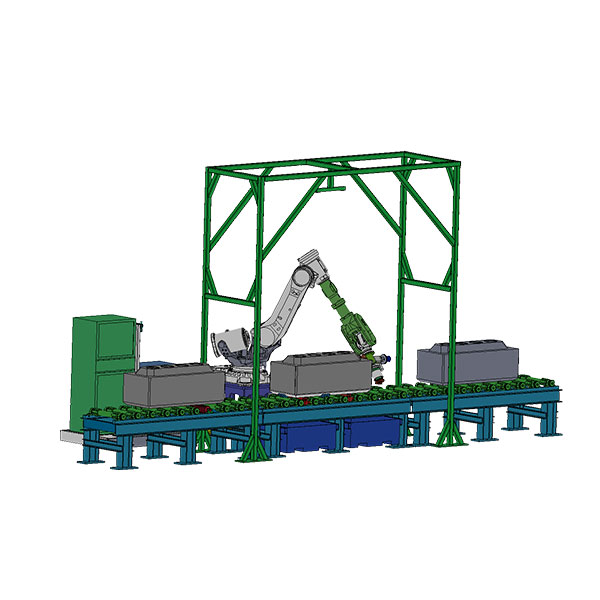
Kamera tat-tagħlim fil-fond se tieħu ritratti ta 'blokki ta' anodi, wara l-ipproċessar tas-sħab u immaġini 3D, se tibgħat il-koordinati tridimensjonali ta 'blokki ta' anodi lir-robot, allura r-robot se tnaddaf l-uċuħ tal-blokki tal-anodi, toqob stub u flawtijiet, apparat li jiġbor it-trab se jieħdu kokk ippakkjar barra filwaqt li l-robot tindif stub toqob.
Konfigurazzjoni tas-sistema
1 Sistema u softwer tal-iffurmar viżwali
2 Robot u sistema tal-illustrar
3 Ġbir tat-trab u sistema ta 'kontroll elettriku
4 sistema ta 'ġarr ta' blokki ta 'anodi
Vantaġġi
1.Sens intelliġenti f'ħin reali
L-algoritmu ta 'tagħlim fil-fond riċerkat u żviluppat b'mod indipendenti mill-kumpanija tagħna jista' jħoss il-pożizzjoni tal-blokki tal-karbonju u l-istatus li jiċċaqlaq tar-robot f'ħin reali biex jaġġusta l-azzjonijiet tal-illustrar tar-robot.
2.Illustrar flessibbli
Ix-xkupilja fl-floating milling cutter jippermetti li r-robot ineħħi l-kokk tal-ippakkjar li huwa kemmxejn jeħel fuq il-wiċċ tal-blokki tal-anodi mingħajr ma jweġġa 'l-blokki tal-karbonju.
3.Naddaf mingħajr trab
L-apparat li jiġbor it-trab jista 'jneħħi l-kokk tal-ippakkjar li huwa mqaxxar minn blokki tal-anodi u tindif manwali mhuwiex meħtieġ.
4.Tindif bir-reqqa ta 'flawtijiet f'toqob stub
Flawtijiet fit-toqob stub huma mnaddfa minn cutter tat-tħin li jista 'jitnaddaf sewwa l-ippakkjar tal-kokk stick ġewwa.

Teknoloġiji tat-tindif tat-toqba tal-istub
1.Sett tat-tħin tat-tindif tal-flawt
It-tindif tal-chute tat-toqba stub jitlesta minn cutter tat-tħin li jdur b'veloċità għolja, li jista 'jnaddaf il-kokk tal-ippakkjar.
L-ebda forza tal-impatt, tevita b'mod effettiv il-ħsara tal-impatt tal-manipulatur u tiżgura l-eżattezza tal-operat tal-manipulatur.
2.Mekkaniżmu ta 'sensing intelliġenti
Il-barraxa spirali hija mgħammra b'sensor tal-veloċità.Meta jkun hemm ħadid fil-
kokk tal-ippakkjar, il-veloċità se tonqos malajr, sabiex tieqaf tħin u tagħti an
allarm.
3.Stub toqba ġbid mekkaniżmu
Il-barraxa spirali jista 'jinbarax il-kokk tal-ippakkjar fit-toqba stub, u l-ippakkjar
kokk jinġibed 'il bogħod mill-pajp tal-ġbid fin-nofs.
Teknoloġiji tat-tindif tal-wiċċ tal-anodi
1.Mekkaniżmu ta 'tindif f'wiċċ l-ilma kkontrollat bil-forza
Il-forza tal-ippressar hija realizzata miċ-ċilindru, li huwa kkontrollat mill-valv proporzjonali pjeżoelettriku, b'sensittività għolja u rispons mgħaġġel.
2.Mekkaniżmu ta 'trażmissjoni tal-ballun
It-trasmissjoni tal-qawwa tadotta trasmissjoni tal-ballun, bi preċiżjoni ta 'kontroll ta' pressjoni għolja, frizzjoni li ddur żgħira u l-ebda kklampjar ta 'għodda.
3.Angolu tar-ras tal-qtugħ f'wiċċ l-ilma
Ir-ras tal-qtugħ float fid-direzzjoni angolari biex tagħmel ir-ras tal-qtugħ taqbel mill-qrib mal-biċċa tax-xogħol.
4.Acquisition u kontroll intelliġenti
B'sensors ta 'veloċità u spostament, sinjali ta' feedback f'ħin reali huma pprovduti matul il-proċess tax-xogħol, sabiex jinbidlu diversi parametri tat-tħin f'ħin reali biex
tikseb l-aħjar effett tat-tindif.
5.Self jegħleb funzjoni
Il-programm għandu funzjoni ta 'awto-tagħlim.Aktar ma tkun akkumulata data fid-database, aħjar ikun l-effett tat-tħin.
6.Disinn tal-qtugħ u għażla tal-materjal
Ir-ras tal-qtugħ hija magħmula minn azzar liga Cr12, li hija soda u durabbli.Il-ponta tax-xafra hija lesta xafra tal-azzar tat-tungstenu, li hija faċli biex tissostitwixxi.